
哈工大《carbon》:石墨烯纳米片基超薄柔性机械手 | 山东利特纳米技术有限公司-pg电子试玩入口
柔性驱动器有别于普通驱动器,不但能够将能量转换为机械能,实现驱动,而且具有柔性的特点,在人造肌肉、柔性机器人、微型机器手臂等领域具有广阔的应用前景。
近日,哈尔滨工业大学柔性电子与热管理课题组与中国航天科技集团西安微电子技术研究所和澳大利亚新南威尔士大学合作,利用石墨烯极低的平面热膨胀系数以及具有电热效应的特点,共同研制了基于石墨烯纳米片的超薄型柔性机械手(驱动器)。该柔性机械手(驱动器)的厚度小于0.2mm,具有双层结构,能够实现低电压驱动弯曲,并用来制备柔性手指、柔性手掌、柔性章鱼爪等器件,实现物质抓取和举起等动作。该项目的创新点在于:1)通过界面工程实现了石墨烯纳米片在复合膜中的取向分布,从而让复合膜具有了良好的导电性和很小的平面膨胀系数;2)能够通过电压(3-48v)的精细控制实现柔性驱动器的定量弯曲;3)加工工艺简单、高效,可规模化生产。
相关成果发表于期刊carbon上(electro-thermally driven flexiblerobot arms based on stacking-controlled graphite nanocomposites, 2019, 152:873-881, https://doi.org/10.1016/j.carbon.2019.06.075),王华涛副教授和吴韬教授为论文的共同通讯作者。
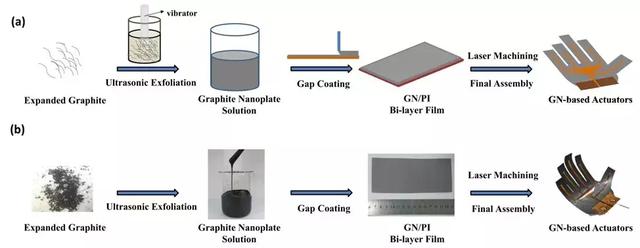
图1. 柔性驱动器的制备工艺图

图2. 柔性驱动器复合膜的显微结构示意图和sem照片
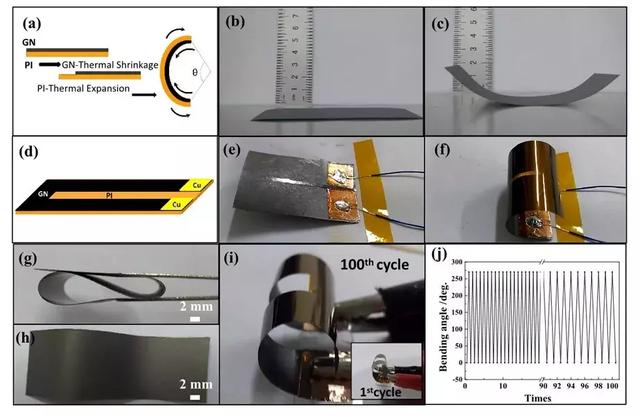
图3 柔性驱动器的结构和性能表征(a)结构示意图和弯曲机理;(b)双层结构的室温照片和(c)高温下的弯曲(d)驱动器电热回路结构图和(e)实物图、(f)弯曲图;(g、h)双层结构良好的柔性;(i、j)驱动器弯曲图和多次循环测试
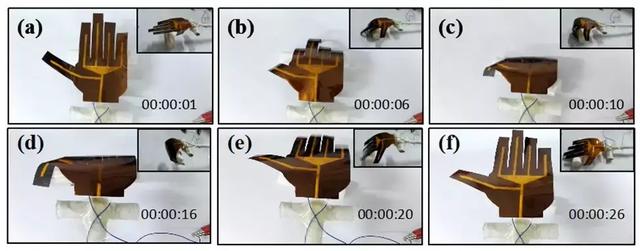
图4. 柔性手掌抓取物体

图5. 柔性章鱼爪抓取物体
本文来自高分子科学前沿,本文观点不代表利特纳米立场,转载请联系原作者。